According to possible gap between CT and all PETs, the spheres' mask is computed and displayed like the following :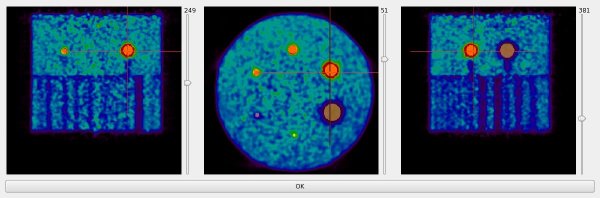
run_parallele: Boolean ( input )
display_fusion_roi_pet: Choice ( input )
CT: Phantom CT ( input )
Pets_mean: ListOf( Phantom PET Mean ) ( input )
PET_mean_toDisplay: Phantom PET Mean ( optional, input )
jzkSpec: Phantom Spec ( input )
step: Float ( input )step of research : it's a radiant used by the Hough algorithm to find sphere center. For a little step, you have a more precise research, but it's more time consuming
decalage_X: Float ( optional, input )shift on X axis . It's a number of voxels used to fix the gap between PET and CT
decalage_Y: Float ( optional, input )shift on Y axis . It's a number of voxels used to fix the gap between PET and CT
decalage_Z: Float ( optional, input )shift on Z axis . It's a number of voxels used to fix the gap between PET and CT
erosionMax: Integer ( optional, input )if the sphere diameter - erosionMax > maxErosionMinSphSize, then the sphere is eroded by erosionMax else it's eroded with erosionMin
erosionMin: Integer ( input )if the sphere diameter - erosionMax > maxErosionMinSphSize, then the sphere is eroded by erosionMax else it's eroded with erosionMin
maxErrosionMinSphSize: Integer ( input )if the sphere diameter - erosionMax > maxErosionMinSphSize, then the sphere is eroded by erosionMax else it's eroded with erosionMin
sph_rois: Phantom ROI Sph ( output )
rotAngle_forNoise: Integer ( input )
sph_inverseSort_forNoise: Boolean ( input )spheres' ROI are build in sphere activity, but also in noise (background). This ROI are just shifted thanks to a rotation around Z axis. If sph_inverseSor_forNoise is True, then the sphere order is reversed, so the littlest ROI in noise is near the biggest ROI in activity. Usefull to be sure to not have a noise ROI touching activity due to partial volume effect.
sph_roi_in_Noise: Phantom ROI Sph inNoise ( output )
verbose: Boolean ( input )
Toolbox : Nuclear Imaging
User level : 2
Identifier :
jzkBuildErrodedRois_inCtFile name :
brainvisa/toolboxes/nuclearimaging/processes/jaszczak/jzkBuildErrodedRois_inCt.pySupported file formats :
CT :NIFTI-1 image, NIFTI-1 imagePets_mean :NIFTI-1 image, NIFTI-1 imagePET_mean_toDisplay :NIFTI-1 image, NIFTI-1 imagejzkSpec :CSV file, CSV filesph_rois :NIFTI-1 image, NIFTI-1 imagesph_roi_in_Noise :NIFTI-1 image, NIFTI-1 image