According to possible gap between CT and all PETs, the spheres' mask is computed and displayed like the following :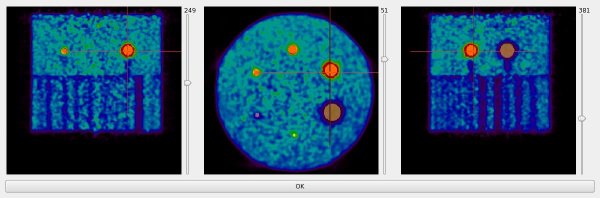
run_parallele: Booléen ( input )
display_fusion_roi_pet: Choice ( input )
CT: Phantom CT ( entrée )
Pets_mean: ListOf( Phantom PET Mean ) ( input )
PET_mean_toDisplay: Phantom PET Mean ( optional, entrée )
jzkSpec: Phantom Spec ( entrée )
step: Réel ( input )pas de recherche : c'est un angle en radian utilisé par l'algorithme de Hough lors de la recherche du centre d'une sphère. Plus ce pas est petit, plus la recherche est précise, mais elle est aussi plus lente.
decalage_X: Réel ( optional, input )Décalage sur l'axe X. C'est un nombre de voxel utilisé pour corriger le décalage entre les images CT et TEP
decalage_Y: Réel ( optional, input )Décalage sur l'axe Y. C'est un nombre de voxel utilisé pour corriger le décalage entre les images CT et TEP
decalage_Z: Réel ( optional, input )Décalage sur l'axe Z. C'est un nombre de voxel utilisé pour corriger le décalage entre les images CT et TEP
erosionMax: Entier ( optional, input )Si le diamètre de la sphère - erosionMax > maxErosionMinSphSize, alors la sphère est erodée avec la valeur erosionMax sinon elle est érodée avec la valeur erosionMin
erosionMin: Entier ( input )Si le diamètre de la sphère - erosionMax > maxErosionMinSphSize, alors la sphère est erodée avec la valeur erosionMax sinon elle est érodée avec la valeur erosionMin
maxErrosionMinSphSize: Entier ( input )Si le diamètre de la sphère - erosionMax > maxErosionMinSphSize, alors la sphère est erodée avec la valeur erosionMax sinon elle est érodée avec la valeur erosionMin
sph_rois: Phantom ROI Sph ( sortie )
rotAngle_forNoise: Entier ( input )
sph_inverseSort_forNoise: Booléen ( input )Les régions d'intéret des sphères sont construites non seulement au niveau des sphères, mais aussi dans le bruit de fond. Pour cela, les regions d'intérets sont décalées grace à une rotation autour de l'axe Z. Si le paramètre sph_inverseSort_forNoise est vrai, l'ordre des ROI de sphères dans le bruit de fond est inversé, de sorte que la plus petite roi dans le fond se trouve à coté de la plus grosse dans l'activité, ceci afin d'etre sure que les ROI dans le fond ne touchent pas d'activé du à l'effet de volume partiel
sph_roi_in_Noise: Phantom ROI Sph inNoise ( sortie )
verbose: Booléen ( input )
Toolbox : Imagerie nucléaire
Niveau d'utilisateur : 2
Identifiant :
jzkBuildErrodedRois_inCtNom de fichier :
brainvisa/toolboxes/nuclearimaging/processes/jaszczak/jzkBuildErrodedRois_inCt.pySupported file formats :
CT :NIFTI-1 image, NIFTI-1 imagePets_mean :NIFTI-1 image, NIFTI-1 imagePET_mean_toDisplay :NIFTI-1 image, NIFTI-1 imagejzkSpec :CSV file, CSV filesph_rois :NIFTI-1 image, NIFTI-1 imagesph_roi_in_Noise :NIFTI-1 image, NIFTI-1 image