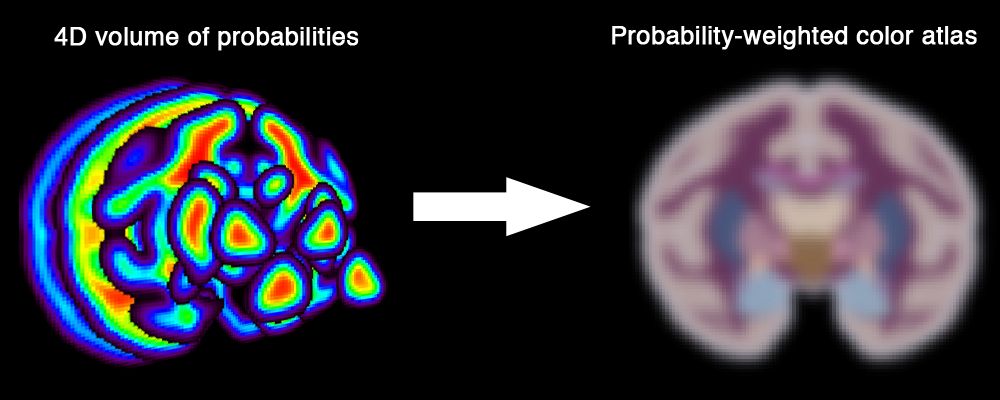
This process converts a 4D volume of probabilities into an atlas-like RGB volume were colors are weighted by class probabilities. This allows to look at all the probabilities at once. It is for visualization purposes only.
Description
Figure 1. Class probabilities stored in the 4D volume are used to merge the atlas colors with appropriate weights. A voxel with a probability of 1 to belong to class isocortex will have th same color as in a segmentation. A voxel with probabilities 0.5 to belong to isocortex and 0.5 to belong to white matter will have a color obtained by the merge of the corresponding colors.
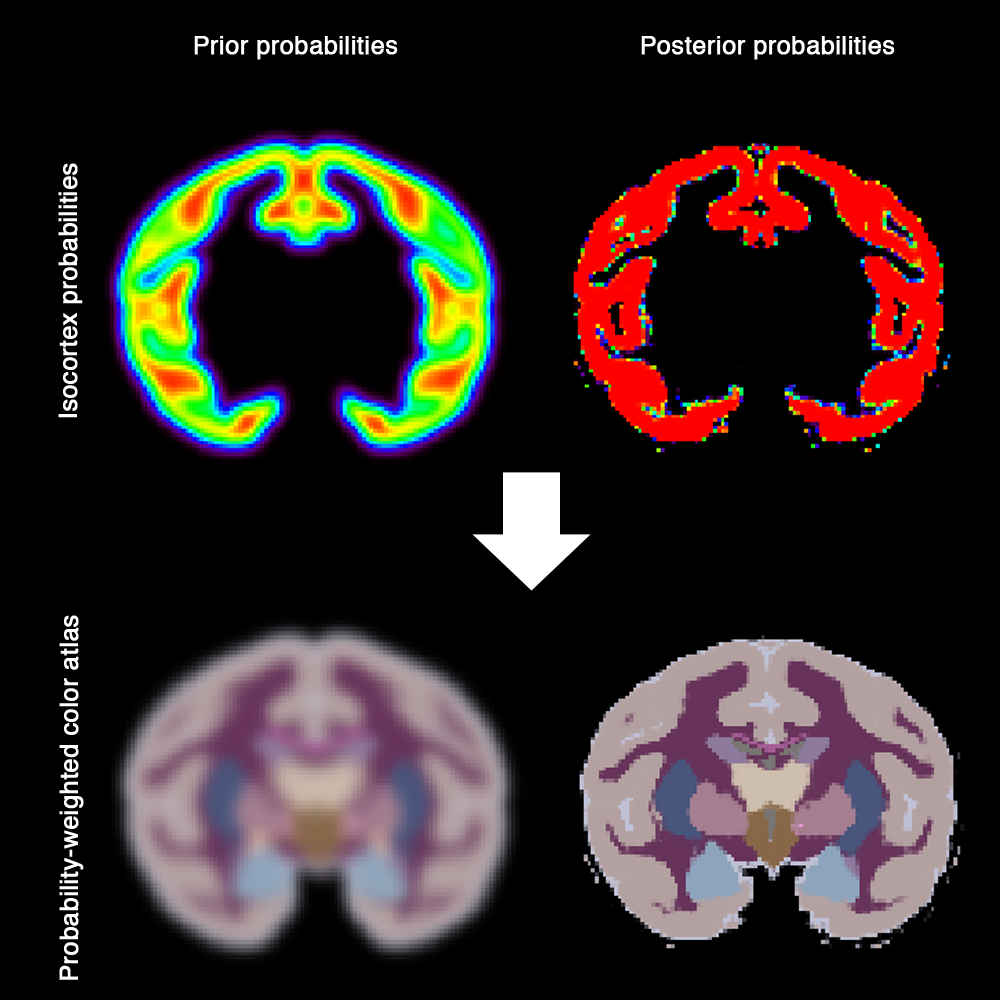
Figure 2. Example of application. The first columns shows the probability map and corresponding color atlas for the prior probabilities (the ones derived from the registered atlas). The second column shows the probability map and corresponding color atlas for the posterior probabilities (obtained after EM optimization and used to derive the resulting segmentation).