 |
aimsalgo
5.0.5
Neuroimaging image processing
|
|
aimsalgo
5.0.5
Neuroimaging image processing
|
Resampling of data from a volume, applying a transformation. More...
#include <aims/resampling/resampler.h>
Public Member Functions | |
| Resampler () | |
| virtual | ~Resampler () |
| void | doit (const aims::AffineTransformation3d &transform, carto::Volume< T > &output_data) const |
| Resample the input volume set with setRef() into an existing volume. More... | |
| carto::VolumeRef< T > | doit (const aims::AffineTransformation3d &transform, int dimX, int dimY, int dimZ, const Point3df &voxel_size) const |
| Resample the input volume set with setRef() in a newly allocated volume. More... | |
| virtual void | resample (const carto::Volume< T > &input_data, const aims::AffineTransformation3d &transform, const T &background, carto::Volume< T > &output_data, bool verbose=false) const |
| Resample a volume into an existing output volume. More... | |
| void | resample (const carto::Volume< T > &input_data, const aims::AffineTransformation3d &transform, const T &background, const Point3df &output_location, T &output_value, int timestep) const |
| Resample a volume at a single location. More... | |
| void | resample_inv (const carto::Volume< T > &input_data, const soma::Transformation3d &inverse_transform_to_mm, const T &background, const Point3df &output_location, T &output_value, int timestep) const |
| Resample a volume at a single location. More... | |
| void | resample_inv (const carto::Volume< T > &input_data, const soma::Transformation3d &inverse_transform_to_mm, const T &background, carto::Volume< T > &output_data, bool verbose=false) const |
| Resample a volume into an existing output volume. More... | |
| void | resample_inv_to_vox (const carto::Volume< T > &input_data, const soma::Transformation3d &inverse_transform_to_vox, const T &background, const Point3df &output_location, T &output_value, int timestep) const |
| Resample a volume at a single location. More... | |
| virtual void | resample_inv_to_vox (const carto::Volume< T > &input_data, const soma::Transformation3d &inverse_transform_to_vox, const T &background, carto::Volume< T > &output_data, bool verbose=false) const |
| Resample a volume into an existing output volume. More... | |
| void | setRef (const carto::rc_ptr< carto::Volume< T > > &ref) |
| Set the input data to be resampled by the doit() methods. More... | |
| const carto::rc_ptr< carto::Volume< T > > & | ref () const |
| Input data to be resampled by the doit() methods. More... | |
| void | setDefaultValue (T val) |
| Set the background value to be used by the doit() methods. More... | |
| const T & | defaultValue () const |
| Background value used by the doit() methods. More... | |
 Public Member Functions inherited from carto::RCObject Public Member Functions inherited from carto::RCObject | |
| RCObject () | |
| RCObject (const RCObject &) | |
| RCObject & | operator= (const RCObject &) |
| virtual | ~RCObject () |
Protected Member Functions | |
| virtual void | doResample (const carto::Volume< T > &input_data, const soma::Transformation3d &inverse_transform, const T &background, const Point3df &output_location, T &output_value, int timestep) const =0 |
| Resample a volume at a single location. More... | |
| virtual void | updateParameters (const carto::Volume< T > &, int, bool) const |
| Method called before doResample() for each time step. More... | |
Protected Attributes | |
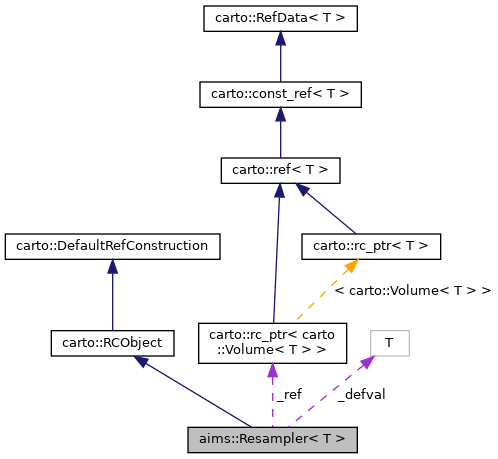
| carto::rc_ptr< carto::Volume< T > > | _ref |
| T | _defval |
Additional Inherited Members | |
| Public Types inherited from carto::RCObject | |
| typedef int | RefCounterType |
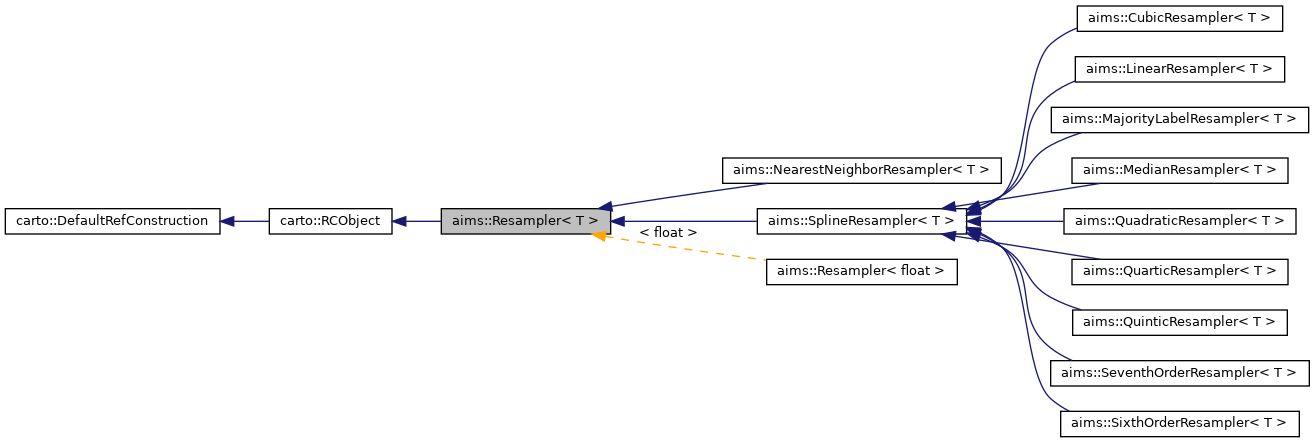
Resampling of data from a volume, applying a transformation.
The doit() and resample() methods can be used to apply an affine transformation (aims::AffineTransformation3d). They take a direct transformation, i.e. the transformation goes from the space of the input image (unit: mm) to the space of the output image (unit: mm). The transformation is inverted and normalized internally as needed, because the resamplers "pull" data by transforming output coordinates into input coordinates.
The doit() methods work on input data passed to the setRef() method. setDefaultValue() can also be called to set the background value.
The resample() methods provide stateless alternatives.
You can also use arbitrary non-affine transformations (inheriting soma::Transformation3d) by using the resample_inv() family of methods. In this case, you must pass the backward transformation (from output space to input space), because of the "pulling" mechanism described above.
Beware that contrary to the other methods, the resample_inv_to_vox() overloads take a transformation that maps to voxel coordinates of the input image. These methods can be slightly faster than resample_inv() because they map directly to the API that the actual resamplers are implementing (doResample()). The performance gain is especially noticeable for repeated calls to the overloads that perform resampling for a single point only.
Definition at line 75 of file resampler.h.
| aims::Resampler< T >::Resampler | ( | ) |
Definition at line 61 of file resampler_d.h.
|
inlinevirtual |
Definition at line 80 of file resampler.h.
|
inline |
Background value used by the doit() methods.
Definition at line 318 of file resampler.h.
| void aims::Resampler< T >::doit | ( | const aims::AffineTransformation3d & | transform, |
| carto::Volume< T > & | output_data | ||
| ) | const |
Resample the input volume set with setRef() into an existing volume.
| [in] | transform | transformation from coordinates of the input volume (unit: mm), to coordinates of the output* volume (unit: mm) (its inverse is used for resampling) |
| [in,out] | output_data | existing volume to be filled with resampled data (its pre-existing dimensions and voxel size are used) |
| std::runtime_error | if no input volume has been set with setRef. |
The background value (to be used for regions that are outside of the input volume) can be set with setDefaultValue().
The transformations, referentials, and referential header attributes of output_data are not touched; it is up to the calling code to update them accordingly.
The level of verbosity is taken from carto::verbose (i.e. the --verbose command-line argument is honoured).
Definition at line 222 of file resampler_d.h.
Referenced by BlockMatching< T >::doit(), and aims::Resampler< float >::~Resampler().
| carto::VolumeRef< T > aims::Resampler< T >::doit | ( | const aims::AffineTransformation3d & | transform, |
| int | dimX, | ||
| int | dimY, | ||
| int | dimZ, | ||
| const Point3df & | voxel_size | ||
| ) | const |
Resample the input volume set with setRef() in a newly allocated volume.
| [in] | transform | transformation from coordinates of the input* volume (unit: mm), to coordinates of the output volume (unit: mm) (its inverse is used for resampling) |
| [in] | dimX,dimY,dimZ | dimensions of the newly allocated volume |
| [in] | voxel_size | voxel size of the newly allocated volume (unit: mm) |
| std::runtime_error | if no input volume has been set with setRef. |
The background value (to be used for regions that are outside of the input volume) can be set with setDefaultValue().
The level of verbosity is taken from carto::verbose (i.e. the --verbose command-line argument is honoured).
The transformations, referentials, and referential header attributes of the new volume are reset if transform.isIdentity() is false:
referential attribute is removed transformations is composed with transform so that the output volume still points to the original space. If that is not possible (e.g. the transformations attribute is missing or invalid), then a new transformation is added that points to the input volume. Definition at line 233 of file resampler_d.h.
|
protectedpure virtual |
Resample a volume at a single location.
| [in] | input_data | data to be resampled (its voxel size is not* taken into account) |
| [in] | inverse_transform | transformation from output coordinates to coordinates of the input volume (unit: voxels) |
| [in] | background | value set if the transformed point is outside of the input volume |
| [in] | output_location | coordinates in output space (source space of transform) |
| [out] | output_value | variable to be filled with resampled data |
| [in] | timestep | for 4D volume, time step to be used |
Implemented in aims::SplineResampler< T >, and aims::NearestNeighborResampler< T >.
Referenced by aims::Resampler< float >::defaultValue(), and aims::Resampler< float >::resample_inv_to_vox().
|
inline |
Input data to be resampled by the doit() methods.
Definition at line 312 of file resampler.h.
Referenced by aims::Resampler< float >::resample_inv_to_vox().
|
virtual |
Resample a volume into an existing output volume.
| [in] | input_data | data to be resampled (its voxel size is taken into account) |
| [in] | transform | transformation from coordinates of the input volume (unit: mm), to coordinates of the output* volume (unit: mm) (its inverse is used for resampling) |
| [in] | background | value set in output regions that are outside of the transformed input volume |
| [in,out] | output_data | existing volume to be filled with resampled data (its pre-existing dimensions and voxel size are used) |
| [in] | verbose | print progress to stdout |
The transformations, referentials, and referential header attributes of output_data are not touched; it is up to the calling code to update them accordingly.
This method does not use the instance state set by setRef() or setDefaultValue().
Derived classes can override this method to optimize interpolation of a full volume. The base class method simply calls doResample for each point.
Definition at line 175 of file resampler_d.h.
Referenced by aims::Resampler< float >::~Resampler().
| void aims::Resampler< T >::resample | ( | const carto::Volume< T > & | input_data, |
| const aims::AffineTransformation3d & | transform, | ||
| const T & | background, | ||
| const Point3df & | output_location, | ||
| T & | output_value, | ||
| int | timestep | ||
| ) | const |
Resample a volume at a single location.
| [in] | input_data | data to be resampled (its voxel size is taken into account) |
| [in] | transform | transformation from coordinates of the input* volume (unit: mm), to output coordinates (its inverse is used for resampling) |
| [in] | background | value set in output regions that are outside of the transformed input volume |
| [in] | output_location | coordinates in output space (destination space of transform) |
| [out] | output_value | variable to be filled with resampled data |
| [in] | timestep | for 4D volume, time step to be used |
This method does not use the instance state set by setRef() or setDefaultValue().
Definition at line 198 of file resampler_d.h.
| void aims::Resampler< T >::resample_inv | ( | const carto::Volume< T > & | input_data, |
| const soma::Transformation3d & | inverse_transform_to_mm, | ||
| const T & | background, | ||
| const Point3df & | output_location, | ||
| T & | output_value, | ||
| int | timestep | ||
| ) | const |
Resample a volume at a single location.
| [in] | input_data | data to be resampled (its voxel size is taken into account) |
| [in] | inverse_transform | transformation from output coordinates to coordinates of the input volume (unit: mm) |
| [in] | background | value set if the transformed point is outside of the input volume |
| [in] | output_location | coordinates in output space (source space of transform) |
| [out] | output_value | variable to be filled with resampled data |
| [in] | timestep | for 4D volume, time step to be used |
This method does not use the instance state set by setRef() or setDefaultValue().
Definition at line 151 of file resampler_d.h.
Referenced by aims::Resampler< float >::~Resampler().
| void aims::Resampler< T >::resample_inv | ( | const carto::Volume< T > & | input_data, |
| const soma::Transformation3d & | inverse_transform_to_mm, | ||
| const T & | background, | ||
| carto::Volume< T > & | output_data, | ||
| bool | verbose = false |
||
| ) | const |
Resample a volume into an existing output volume.
| [in] | input_data | data to be resampled (its voxel size is taken into account) |
| [in] | transform | transformation from coordinates of the output* volume (unit: mm), to coordinates of the input volume *(unit: mm)* |
| [in] | background | value set in output regions that are outside of the transformed input volume |
| [in,out] | output_data | existing volume to be filled with resampled data (its pre-existing dimensions and voxel size are used) |
| [in] | verbose | print progress to stdout |
The transformations, referentials, and referential header attributes of output_data are not touched; it is up to the calling code to update them accordingly.
This method does not use the instance state set by setRef() or setDefaultValue().
Definition at line 129 of file resampler_d.h.
|
inline |
Resample a volume at a single location.
| [in] | input_data | data to be resampled (its voxel size is not** taken into account) |
| [in] | inverse_transform_to_vox | transformation from output coordinates to coordinates of the input volume (unit: voxel) |
| [in] | background | value set if the transformed point is outside of the input volume |
| [in] | output_location | coordinates in output space (source space of transform) |
| [out] | output_value | variable to be filled with resampled data |
| [in] | timestep | for 4D volume, time step to be used |
This method does not use the instance state set by setRef() or setDefaultValue().
Definition at line 266 of file resampler.h.
Referenced by aims::Resampler< float >::resample_inv_to_vox().
|
virtual |
Resample a volume into an existing output volume.
| [in] | input_data | data to be resampled (its voxel size is not** taken into account) |
| [in] | inverse_transform_to_vox | transformation from coordinates of the output volume (unit: mm), to coordinates of the input volume (unit: voxel)** |
| [in] | background | value set in output regions that are outside of the transformed input volume |
| [in,out] | output_data | existing volume to be filled with resampled data (its pre-existing dimensions and voxel size are used) |
| [in] | verbose | print progress to stdout |
The transformations, referentials, and referential header attributes of output_data are not touched; it is up to the calling code to update them accordingly.
This method does not use the instance state set by setRef() or setDefaultValue().
Derived classes can override this method to optimize interpolation of a full volume. The base class method simply calls doResample for each point.
Reimplemented in aims::SplineResampler< T >.
Definition at line 69 of file resampler_d.h.
|
inline |
Set the background value to be used by the doit() methods.
Definition at line 315 of file resampler.h.
| void aims::Resampler< T >::setRef | ( | const carto::rc_ptr< carto::Volume< T > > & | ref | ) |
Set the input data to be resampled by the doit() methods.
Definition at line 307 of file resampler_d.h.
Referenced by BlockMatching< T >::doit(), and aims::Resampler< float >::resample_inv_to_vox().
|
inlineprotectedvirtual |
Method called before doResample() for each time step.
This method is called by all the resampling methods (resample() and doit()) before they call doResample for a given time point t.
The base class version of this method does nothing.
Reimplemented in aims::SplineResampler< T >.
Definition at line 349 of file resampler.h.
Referenced by aims::Resampler< float >::resample_inv_to_vox().
|
protected |
Definition at line 354 of file resampler.h.
Referenced by aims::Resampler< float >::defaultValue(), and aims::Resampler< float >::setDefaultValue().
|
protected |
Definition at line 351 of file resampler.h.
Referenced by aims::Resampler< float >::ref().
 1.8.13
1.8.13