 |
aimsdata
5.1.2
Neuroimaging data handling
|
|
aimsdata
5.1.2
Neuroimaging data handling
|
#include <aims/config/aimsdata_config.h>#include <aims/connectivity/connectivity.h>#include <cartodata/volume/volume.h>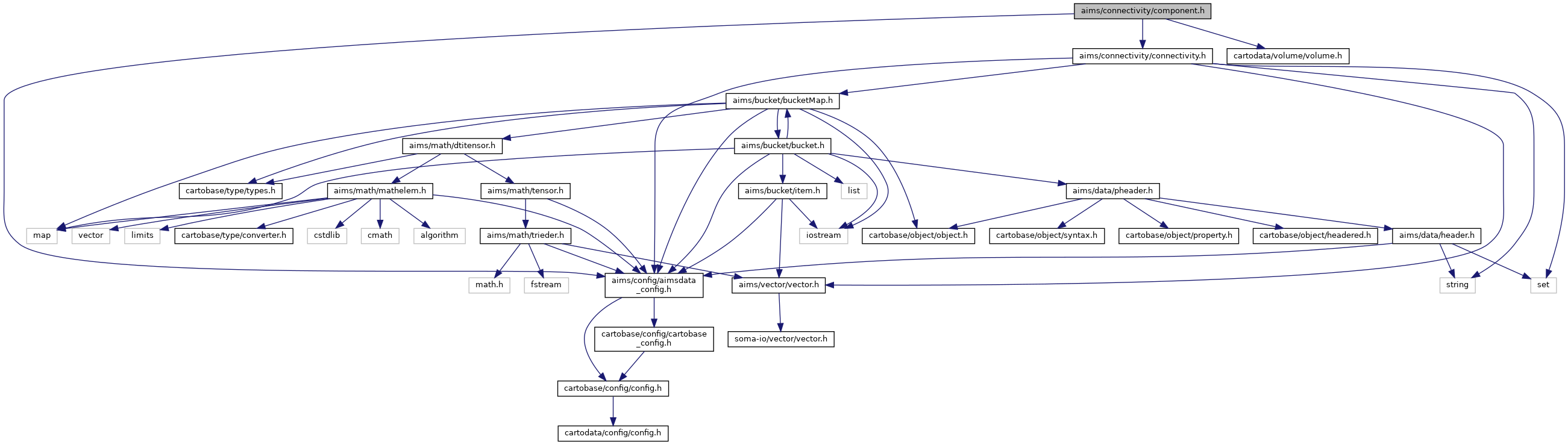
Go to the source code of this file.
Classes | |
| class | aims::ConnectedComponentEngine< T, O > |
| class | aims::ConnectedComponentEngine< carto::VolumeRef< T >, carto::VolumeRef< O > > |
Namespaces | |
| aims | |
| The class for EcatSino data write operation. | |
Functions | |
| template<typename T > | |
| void | aims::AimsConnectedComponent (carto::VolumeRef< T > data, aims::Connectivity::Type connectivity, std::map< T, size_t > &valids, const T &backgrnd=0, bool bin=true, size_t minSize=0, size_t maxSize=0, size_t numMax=0, bool verbose=true) |
| template<typename T > | |
| void | aims::AimsConnectedComponent (carto::VolumeRef< T > data, aims::Connectivity::Type connectivity, const T &backgrnd=0, bool bin=true, size_t minSize=0, size_t maxSize=0, size_t numMax=0, bool verbose=true) |
| template<typename T > | |
| void | aims::AimsConnectedComponent (BucketMap< T > &data, aims::Connectivity::Type connectivity, const T &backgrnd=0, bool bin=true, size_t minSize=0, size_t maxSize=0, size_t numMax=0, bool verbose=true) |
| template<typename T > | |
| void | aims::AimsConnectedComponent (AimsBucket< Void > &component, const carto::VolumeRef< T > &data, aims::Connectivity::Type connectivity, const T &backgrnd=0, bool bin=true, size_t minsize=0, size_t maxSize=0, size_t maxcomp=0, bool verbose=true) |
| template<typename T > | |
| void | aims::AimsConnectedComponent (AimsBucket< Void > &component, const BucketMap< T > &data, Connectivity::Type connectivity, const T &backgrnd=0, bool bin=true, size_t minsize=0, size_t maxSize=0, size_t maxcomp=0, bool verbose=true) |
| template<typename T > | |
| carto::VolumeRef< int16_t > | aims::AimsLabeledConnectedComponent (AimsBucket< Void > &component, const carto::VolumeRef< T > &data, aims::Connectivity::Type connectivity, const T &backgrnd=0, bool bin=true, size_t minsize=0, size_t maxSize=0, size_t maxcomp=0, bool verbose=true) |