 |
aimsdata
5.1.2
Neuroimaging data handling
|
|
aimsdata
5.1.2
Neuroimaging data handling
|
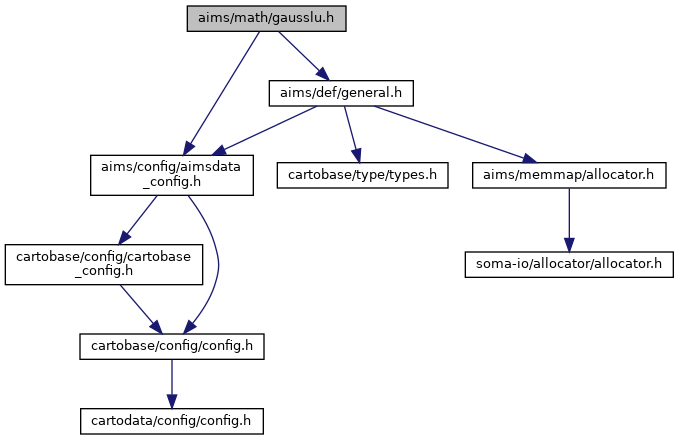
Go to the source code of this file.
Namespaces | |
| carto | |
Functions | |
LU decomposition of matrix. | |
The source matrix is a. As output, a is the LU decomposition. indx is an output vector that records the row permutation effected by the partial pivoting. d is output as +1 or -1 depending wether the number of row interchanges was even or odd. | |
| float | AimsDecompositionLU (carto::VolumeRef< float > &a, carto::VolumeRef< int32_t > &indx) |
LU forward and backward substitution. | |
Solves the set of N linear equations A.X=B. Here a is input but in LU form. indx is input as the permutation vector returned by LU decomposition. b is input as the right-hand side vector B, and returns with the solution vector X. | |
| void | AimsBackSubstitutionLU (const carto::VolumeRef< float > &a, const carto::VolumeRef< int32_t > &indx, carto::VolumeRef< float > &b) |
Inverse of a matrix. | |
| carto::VolumeRef< float > | AimsInversionLU (const carto::VolumeRef< float > &matrix) |
| Inverse of a float matrix. More... | |
| carto::VolumeRef< cfloat > | AimsInversionLU (const carto::VolumeRef< cfloat > &matrix) |
| Inverse of a complex float matrix. More... | |
Resolution of the linear equation A.X = B. | |
| carto::VolumeRef< float > | AimsLinearResolutionLU (const carto::VolumeRef< float > &matrix, const carto::VolumeRef< float > &b) |
| Resolution in float. More... | |
| carto::VolumeRef< cfloat > | AimsLinearResolutionLU (const carto::VolumeRef< cfloat > &matrix, const carto::VolumeRef< cfloat > &b) |
| Resolution in complex float. More... | |
Determinant of a matrix. | |
| float | AimsDeterminantLU (const carto::VolumeRef< float > &matrix) |
Linear resolution of Toeplitz like system. | |
| void | AimsToeplitz (const carto::VolumeRef< float > &r, const carto::VolumeRef< float > &y, carto::VolumeRef< float > &x) |
| Resolution of system R.x = y where R is a toeplitz matrix decomposed in r=[r(-(N-1)), ...., r(-1), r(0), r(1), ..., r(N-1)]. More... | |
| void AimsBackSubstitutionLU | ( | const carto::VolumeRef< float > & | a, |
| const carto::VolumeRef< int32_t > & | indx, | ||
| carto::VolumeRef< float > & | b | ||
| ) |
| float AimsDecompositionLU | ( | carto::VolumeRef< float > & | a, |
| carto::VolumeRef< int32_t > & | indx | ||
| ) |
| float AimsDeterminantLU | ( | const carto::VolumeRef< float > & | matrix | ) |
| carto::VolumeRef< cfloat > AimsInversionLU | ( | const carto::VolumeRef< cfloat > & | matrix | ) |
Inverse of a complex float matrix.
| carto::VolumeRef<float> AimsInversionLU | ( | const carto::VolumeRef< float > & | matrix | ) |
Inverse of a float matrix.
| carto::VolumeRef< cfloat > AimsLinearResolutionLU | ( | const carto::VolumeRef< cfloat > & | matrix, |
| const carto::VolumeRef< cfloat > & | b | ||
| ) |
Resolution in complex float.
| carto::VolumeRef<float> AimsLinearResolutionLU | ( | const carto::VolumeRef< float > & | matrix, |
| const carto::VolumeRef< float > & | b | ||
| ) |
Resolution in float.
| void AimsToeplitz | ( | const carto::VolumeRef< float > & | r, |
| const carto::VolumeRef< float > & | y, | ||
| carto::VolumeRef< float > & | x | ||
| ) |
Resolution of system R.x = y where R is a toeplitz matrix decomposed in r=[r(-(N-1)), ...., r(-1), r(0), r(1), ..., r(N-1)].
The result is given in x