soma::Transformation Class Reference
Polymorphic base class for spatial transformations. More...
#include <soma-io/transformation/transformation.h>
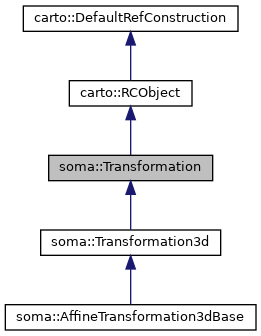
Inheritance diagram for soma::Transformation:
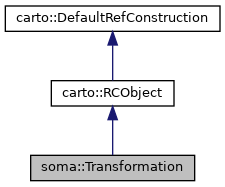
Collaboration diagram for soma::Transformation:
Public Member Functions | |
| virtual | ~Transformation () |
| virtual bool | isIdentity () const |
| Test if the transformation can safely be omitted. More... | |
 Public Member Functions inherited from carto::RCObject Public Member Functions inherited from carto::RCObject | |
| RCObject () | |
| RCObject (const RCObject &) | |
| RCObject & | operator= (const RCObject &) |
| virtual | ~RCObject () |
Protected Member Functions | |
| Transformation () | |
Additional Inherited Members | |
| Public Types inherited from carto::RCObject | |
| typedef int | RefCounterType |
Detailed Description
Polymorphic base class for spatial transformations.
Definition at line 52 of file transformation.h.
Constructor & Destructor Documentation
◆ ~Transformation()
|
virtual |
◆ Transformation()
|
inlineprotected |
Definition at line 74 of file transformation.h.
Member Function Documentation
◆ isIdentity()
|
inlinevirtual |
Test if the transformation can safely be omitted.
This method returns true only if the transformation behaves exactly like an identity transformation (notably, the transform methods will always return the input coordinates unchanged).
- Note
- {Implementors of derived classes may choose to always return false if a test would be difficult to implement or expensive to run. As a result, a false result does not guarantee in general that the transformation is different from identity.}
Reimplemented in soma::AffineTransformation3dBase.
Definition at line 68 of file transformation.h.
The documentation for this class was generated from the following file:
- soma-io/transformation/transformation.h
