 |
aimsdata 6.0.19
Neuroimaging data handling
|
|
aimsdata 6.0.19
Neuroimaging data handling
|
Affine 3D transformation. More...
#include <aims/transformation/affinetransformation3d.h>

Public Member Functions | |
| AffineTransformation3d () | |
| Create an identity transformation. | |
| AffineTransformation3d (const AffineTransformation3d &other) | |
| AffineTransformation3d (const AffineTransformation3dBase &other) | |
| AffineTransformation3d (const std::vector< float > &mat) | |
| Create a AffineTransformation3d from a 4x4 matrix given as a line vector. | |
| AffineTransformation3d (const carto::Object mat) | |
| Create a AffineTransformation3d from a 4x4 matrix given as a line vector in an Object. | |
| AffineTransformation3d (const aims::Quaternion &quat) | |
| virtual | ~AffineTransformation3d () |
| virtual AffineTransformation3d & | operator= (const AffineTransformation3d &other) |
| virtual AffineTransformation3d & | operator= (const std::vector< float > &mat) |
| virtual AffineTransformation3d & | operator= (const carto::Object mat) |
| virtual AffineTransformation3d & | operator= (const aims::Quaternion &quat) |
| virtual bool | operator== (const AffineTransformation3d &) const |
| virtual bool | operator!= (const AffineTransformation3d &) const |
| AffineTransformation3d & | operator*= (const AffineTransformation3dBase &trans) |
| virtual AffineTransformation3d | operator- () const |
| std::unique_ptr< AffineTransformation3d > | inverse () const |
| std::unique_ptr< Transformation > | getInverse () const CARTO_OVERRIDE |
| Point3df | translation () |
| Point3df | translation () const |
| carto::VolumeRef< float > | rotation () |
| const carto::VolumeRef< float > | rotation () const |
| carto::VolumeRef< float > | affine () |
| const carto::VolumeRef< float > | affine () const |
| virtual void | setMatrix (const carto::VolumeRef< float > &mat) |
| virtual void | setRotationAffine (float rx, float ry, float rz, const Point3df &cg=Point3df(0.0)) |
 Public Member Functions inherited from soma::AffineTransformation3dBase Public Member Functions inherited from soma::AffineTransformation3dBase | |
| AffineTransformation3dBase () | |
| AffineTransformation3dBase (const AffineTransformation3dBase &other) | |
| AffineTransformation3dBase (const std::vector< float > &mat) | |
| AffineTransformation3dBase (const carto::Object mat) | |
| virtual | ~AffineTransformation3dBase () |
| virtual AffineTransformation3dBase & | operator= (const AffineTransformation3dBase &other) |
| AffineTransformation3dBase & | operator*= (const AffineTransformation3dBase &trans) |
| AffineTransformation3dBase | operator- () const |
| virtual bool | operator== (const AffineTransformation3dBase &) const |
| virtual void | extendOrder (unsigned n) |
| Point3dd | transform (double x, double y, double z) const |
| Point3dd | transform (const Point3dd &pos) const |
| Point3df | transform (const Point3df &pos) const |
| Point3df | transform (float x, float y, float z) const |
| Point3d | transform (const Point3d &p) const |
| Point3di | transform (const Point3di &p) const |
| Point3di | transform (int x, int y, int z) const |
| virtual std::vector< double > | transform (const std::vector< double > &pos) const |
| virtual std::vector< float > | transform (const std::vector< float > &pos) const |
| virtual std::vector< int > | transform (const std::vector< int > &pos) const |
| Point3dd | transformVector (const Point3dd &vec) const |
| Point3df | transformVector (const Point3df &dir) const |
| Point3df | transformVector (const Point3di &dir) const |
| Point3dd | transformVector (double x, double y, double z) const |
| Point3df | transformVector (float x, float y, float z) const |
| Point3di | transformVector (int x, int y, int z) const |
| virtual std::vector< double > | transformVector (const std::vector< double > &pos) const |
| virtual std::vector< float > | transformVector (const std::vector< float > &pos) const |
| virtual std::vector< int > | transformVector (const std::vector< int > &pos) const |
| Point3dd | transformNormal (const Point3dd &dir) const |
| Point3df | transformNormal (const Point3df &dir) const |
| Point3dd | transformNormal (double x, double y, double z) const |
| Point3df | transformNormal (float x, float y, float z) const |
| Point3dd | transformUnitNormal (const Point3dd &dir) const |
| Point3df | transformUnitNormal (const Point3df &dir) const |
| Point3dd | transformUnitNormal (double x, double y, double z) const |
| Point3df | transformUnitNormal (float x, float y, float z) const |
| bool | isIdentity () const CARTO_OVERRIDE |
| virtual void | setToIdentity () |
| std::unique_ptr< AffineTransformation3dBase > | inverse () const |
| bool | invertible () const CARTO_OVERRIDE |
| std::unique_ptr< Transformation > | getInverse () const CARTO_OVERRIDE |
| virtual void | scale (const Point3df &sizeFrom, const Point3df &sizeTo) |
| void | setTranslation (Point3df trans) |
| void | fromColumnVector (const float *vec) |
| Public Member Functions inherited from soma::Transformation3d | |
| virtual | ~Transformation3d () |
| Point3dd | transform (double x, double y, double z) const |
| Point3dd | transform (const Point3dd &pos) const |
| Point3df | transform (const Point3df &dir) const |
| Point3df | transform (float x, float y, float z) const |
| Point3d | transform (const Point3d &p) const |
| Point3di | transform (const Point3di &p) const |
| Point3di | transform (int x, int y, int z) const |
| Public Member Functions inherited from soma::Transformation | |
| virtual | ~Transformation () |
| virtual Transformation & | operator= (const Transformation &other) |
| carto::Object | header () |
| const carto::Object | header () const |
| void | setHeader (carto::Object ph) |
| Public Member Functions inherited from carto::RCObject | |
| RCObject () | |
| RCObject (const RCObject &) | |
| RCObject & | operator= (const RCObject &) |
| virtual | ~RCObject () |
| Public Member Functions inherited from soma::AffineTransformationBase | |
| AffineTransformationBase (int order=3) | |
| AffineTransformationBase (const AffineTransformationBase &other) | |
| AffineTransformationBase (const std::vector< float > &mat) | |
| AffineTransformationBase (const carto::Object mat) | |
| virtual | ~AffineTransformationBase () |
| virtual AffineTransformationBase & | operator= (const AffineTransformationBase &other) |
| virtual bool | operator== (const AffineTransformationBase &) const |
| AffineTransformationBase & | operator*= (const AffineTransformationBase &trans) |
| AffineTransformationBase | operator- () const |
| void | negate () |
| bool | isIdentity () const CARTO_OVERRIDE |
| bool | isDirect () const override |
| bool | invertible () const CARTO_OVERRIDE |
| std::unique_ptr< AffineTransformationBase > | inverse () const |
| std::unique_ptr< Transformation > | getInverse () const CARTO_OVERRIDE |
| int | order () const |
| virtual void | squeezeOrder (unsigned n, bool check=true, bool notify_fail=true) |
| Table< float > & | matrix () |
| const Table< float > & | matrix () const |
| std::vector< float > | toVector () const |
| std::vector< float > | toColumnVector () const |
| void | fromColumnVector (const std::vector< float > &vec) |
| void | fromColumnVector (const float *vec, unsigned size) |
Static Public Member Functions | |
| static carto::VolumeRef< float > | rotationaroundx (float rx) |
| static carto::VolumeRef< float > | rotationaroundy (float ry) |
| static carto::VolumeRef< float > | rotationaroundz (float rz) |
| static AffineTransformation3d | translationTransform (float tx, float ty, float tz) |
| convenient function which returns a translation transformation | |
| static AffineTransformation3d | translationTransform (const Point3df &t) |
| static AffineTransformation3d | translationTransform (const std::vector< float > &t) |
| Static Public Member Functions inherited from soma::Transformation | |
| static std::vector< T > | vadd (const std::vector< T > &v1, const std::vector< T > &v2) |
| static std::vector< T > | vsub (const std::vector< T > &v1, const std::vector< T > &v2) |
| static std::vector< T > | vadd (const std::vector< T > &v1, const T &v2) |
| static std::vector< T > | vsub (const std::vector< T > &v1, const T &v2) |
| static std::vector< T > | vadd (const T &v1, const std::vector< T > &v2) |
| static std::vector< T > | vsub (const T &v1, const std::vector< T > &v2) |
Additional Inherited Members | |
| Public Types inherited from carto::RCObject | |
| typedef int | RefCounterType |
| Static Public Attributes inherited from soma::AffineTransformationBase | |
| static float | epsilon |
| Protected Member Functions inherited from soma::AffineTransformation3dBase | |
| Point3dd | transformDouble (double x, double y, double z) const CARTO_OVERRIDE |
| Point3df | transformFloat (float x, float y, float z) const CARTO_OVERRIDE |
| Point3di | transformInt (int x, int y, int z) const CARTO_OVERRIDE |
| virtual Point3dd | transformVectorPoint3dd (const Point3dd &vec) const |
| virtual Point3df | transformVectorPoint3df (const Point3df &dir) const |
| virtual Point3dd | transformVectorDouble (double x, double y, double z) const |
| virtual Point3df | transformVectorFloat (float x, float y, float z) const |
| virtual Point3di | transformVectorInt (int x, int y, int z) const |
| virtual Point3dd | transformNormalPoint3dd (const Point3dd &dir) const |
| virtual Point3df | transformNormalPoint3df (const Point3df &dir) const |
| virtual Point3dd | transformNormalDouble (double x, double y, double z) const |
| virtual Point3df | transformNormalFloat (float x, float y, float z) const |
| Protected Member Functions inherited from soma::Transformation3d | |
| Transformation3d () | |
| virtual Point3dd | transformPoint3dd (const Point3dd &pos) const |
| virtual Point3df | transformPoint3df (const Point3df &dir) const |
| virtual Point3d | transformPoint3d (const Point3d &p) const |
| virtual Point3di | transformPoint3di (const Point3di &p) const |
| Protected Member Functions inherited from soma::Transformation | |
| Transformation () | |
| Static Protected Member Functions inherited from carto::DefaultRefConstruction | |
| static const T * | release (const_ref< T > *) |
| Protected Attributes inherited from soma::Transformation | |
| carto::Object | _header |
| Protected Attributes inherited from soma::AffineTransformationBase | |
| Table< float > | _matrix |
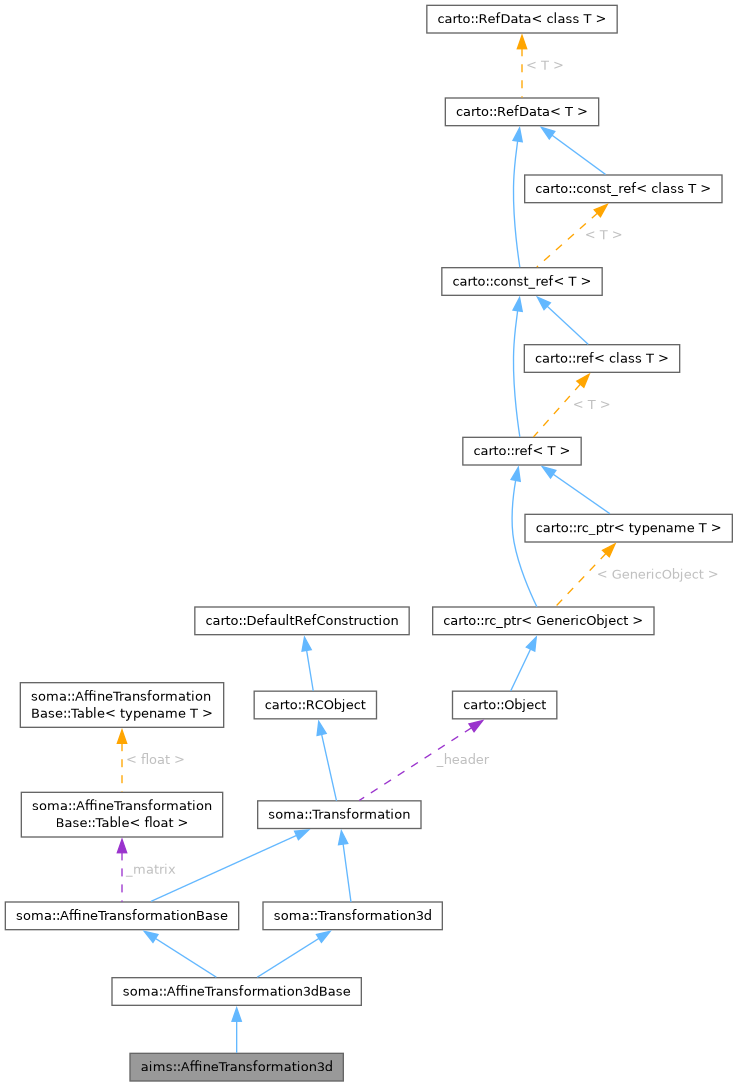
Affine 3D transformation.
WARNING: this is the old Motion class of Aims 3.x, which has been renamed and changed in Aims 4.0. Since Aims 4.7, most of the code is in soma-io where it is used to transform voxels coordinates in IO code. This additional layer mainly adds compatibility with older code which uses VolumeRef for rotation() and Point3df for translation().
A new transformation classes tree has been setup to allow non-linear transformations: see Transformation and Transformation3d. AffineTransformation3d now inherits Transformation3d.
A typedef is still provided for backward compatibility, in aims/resampling/motion.h (the former location of the Motion class) and should minimize inconvenience when compiling old code which used Motion. However a few API differences may cause compilation problems:
In Aims and Soma-IO 4.7, it was needed to move transformations to Soma-IO, because they are used in IO code that is moving to soma-io. To do to, we also had to move AimsVector and typedefs Point3df etc. Then several changes had to be done:
Definition at line 147 of file affinetransformation3d.h.
| aims::AffineTransformation3d::AffineTransformation3d | ( | ) |
Create an identity transformation.
Referenced by AffineTransformation3d(), operator!=(), operator-(), operator=(), operator=(), operator=(), aims::DecomposedAffineTransformation3d::operator=(), operator==(), translation(), translationTransform(), translationTransform(), translationTransform(), and ~AffineTransformation3d().
| aims::AffineTransformation3d::AffineTransformation3d | ( | const AffineTransformation3d & | other | ) |
References AffineTransformation3d().
| aims::AffineTransformation3d::AffineTransformation3d | ( | const AffineTransformation3dBase & | other | ) |
|
explicit |
Create a AffineTransformation3d from a 4x4 matrix given as a line vector.
|
explicit |
Create a AffineTransformation3d from a 4x4 matrix given as a line vector in an Object.
| aims::AffineTransformation3d::AffineTransformation3d | ( | const aims::Quaternion & | quat | ) |
|
virtual |
References AffineTransformation3d().
|
inline |
Definition at line 250 of file affinetransformation3d.h.
References soma::AffineTransformationBase::_matrix, and soma::AffineTransformationBase::matrix().
Referenced by getInverse().
|
inline |
Definition at line 257 of file affinetransformation3d.h.
References soma::AffineTransformationBase::_matrix, and soma::AffineTransformationBase::matrix().
|
virtual |
Reimplemented from soma::Transformation.
References affine(), rotation(), and translation().
| std::unique_ptr< AffineTransformation3d > aims::AffineTransformation3d::inverse | ( | ) | const |
Referenced by aims::SpmWriter< T >::write().
|
virtual |
References AffineTransformation3d().
| AffineTransformation3d & aims::AffineTransformation3d::operator*= | ( | const AffineTransformation3dBase & | trans | ) |
|
virtual |
References AffineTransformation3d().
|
virtual |
Reimplemented in aims::DecomposedAffineTransformation3d.
References AffineTransformation3d().
|
virtual |
|
virtual |
Reimplemented from soma::AffineTransformation3dBase.
References AffineTransformation3d().
|
virtual |
Reimplemented from soma::AffineTransformation3dBase.
References AffineTransformation3d().
|
virtual |
References AffineTransformation3d().
|
inline |
Definition at line 224 of file affinetransformation3d.h.
References soma::AffineTransformationBase::_matrix, and soma::AffineTransformationBase::matrix().
Referenced by getInverse(), aims::SpmReader< T >::read(), and aims::SpmWriter< T >::write().
|
inline |
Definition at line 237 of file affinetransformation3d.h.
References soma::AffineTransformationBase::_matrix, and soma::AffineTransformationBase::matrix().
|
static |
References rotationaroundx().
Referenced by rotationaroundx().
|
static |
References rotationaroundy().
Referenced by rotationaroundy().
|
static |
References rotationaroundz().
Referenced by rotationaroundz().
|
virtual |
References setMatrix().
Referenced by setMatrix().
|
virtual |
Reimplemented in aims::DecomposedAffineTransformation3d.
References setRotationAffine().
Referenced by setRotationAffine().
|
inline |
Definition at line 214 of file affinetransformation3d.h.
References soma::AffineTransformationBase::_matrix, AffineTransformation3d(), and translation().
Referenced by getInverse(), aims::SurfaceManip::meshTransform(), soma::FsSurfFormatReader< D >::readAdditions(), and translation().
|
inline |
Definition at line 219 of file affinetransformation3d.h.
References soma::AffineTransformationBase::_matrix.
|
static |
References AffineTransformation3d(), and translationTransform().
|
static |
References AffineTransformation3d(), and translationTransform().
|
static |
convenient function which returns a translation transformation
References AffineTransformation3d(), and translationTransform().
Referenced by translationTransform(), translationTransform(), and translationTransform().