 |
aimsalgo 6.0.19
Neuroimaging image processing
|
|
aimsalgo 6.0.19
Neuroimaging image processing
|
#include <aims/resampling/sampler.h>
Public Member Functions | |
| Sampler () | |
| virtual | ~Sampler () |
| virtual void | doit (const Motion &motion, carto::rc_ptr< carto::Volume< PVItem > > &thing) const |
| void | setRef (const carto::rc_ptr< carto::Volume< T > > &ref) |
Protected Member Functions | |
| void | _sliceResamp (carto::rc_ptr< carto::Volume< PVItem > > &resamp, PVItem *out, const Point3df &start, int t, const carto::rc_ptr< carto::Volume< float > > &Rinv) const |
Protected Attributes | |
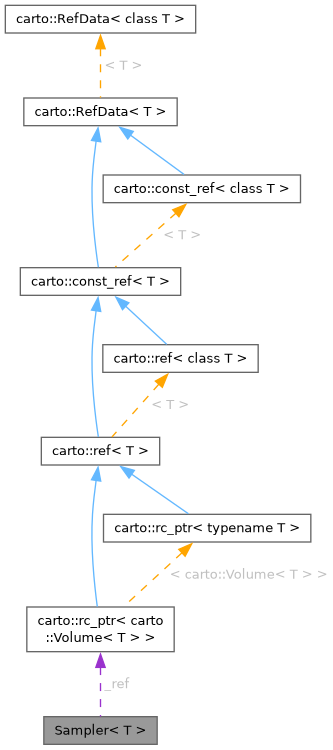
| const carto::rc_ptr< carto::Volume< T > > * | _ref |
|
inlineprotected |
|
inlinevirtual |
Definition at line 109 of file sampler.h.
References _ref, _sliceResamp(), aims::AffineTransformation3d::inverse(), and soma::AffineTransformation3dBase::scale().
|
inline |
|
protected |